リコー 無人搬送車 M2 カスタマイズオプション
リコー 無人搬送車 M2のカスタマイズオプション

カスタマイズオプション1
2輪固定台車自動脱着
2輪固定台車自動脱着
手動で行っていた牽引物の脱着を自動で行うことができます
牽引式AGVを活用したカゴ車搬送業務の自動化を図ります!
カゴ車と自動脱着機能を搭載した牽引式AGVを自動で連結/切り離しさせ搬送させることにより、人手による作業を削減します。
-
*主な対象業種:物流業・倉庫業
-
*カゴ車仕様:後輪2輪固定(最大牽引重量:300kg)
- 牽引台車にバックで近づき自動で接続
- 任意の場所で牽引物をAGVから切り離しが可能

走行例
- 番地:70から前進走行を開始し、番地:71で停止した後、牽引物のあるところまでバックし、連結
- 連結後、番地:71はそのまま直進し、番地:72で停止した後、牽引物を切り離し、AGVのみ単独走行

仕様/制約条件
| 牽引能力 | 最大牽引量 | 300kg(参考値:連結状態や路面状態等による) | |
|---|---|---|---|
| 牽引条件 | 連結部タイプA(イレクターパイプ台車など) | 連結部タイプB(かご台車など ) | |
| 牽引部高さ | 床面から150mm~290mm | 床面から160mm~300mm | |
| 牽引把持部 (奥行方向) |
10~58mm | 42~54mm | |
| 牽引把持部 (幅方向) |
70mm | 47mm | |
| 牽引対象物 | 直径26~32mmの牽引部をもつ台車等 | 奥行50mm程度のL字鋼を用いたかご車等 | |
| 最小旋回半径 | R1,500mm | ||
| 牽引物最低重量 | 15kg以上 | ||
| 牽引物車輪構成 | 後輪2輪固定タイプ
|
||
| 脱着時経路制約 |
|
||
カスタマイズオプション2
4輪フリー台車潜り込み
4輪フリー台車潜り込み
台車の中へAGVが潜り込むことにより、狭い通路でも走行できます
潜り込み式AGVを活用した台車搬送業務の自動化を図ります。
AGVに高さを合わせた台車と電動ピンを搭載した潜り込みAGVを自動で連結/切り離しさせ、搬送させることにより、人手による作業を削減します。
-
*主な対象業種:製造業
-
*台車仕様:4輪フリー(最大牽引重量:60kg)
- 牽引棚車に潜り込み、後方左右のピンを上昇させ、棚車と連結し、棚車と一体で走行
- 任意の場所で牽引物をAGVから切り離し

走行例
- 番地:70から前進走行を開始し、.番地:71で停止した後、後方左右のピンが同時に上昇して連結
- 連結後、番地:72で停止した後、後方左右のピンが同時に下降して切り離し、AGVのみ単独走行

仕様/制約条件
| 牽引能力 | 最大牽引量 | 60Kg(参考値:連結状態や路面状態等による)
|
|---|---|---|
| 牽引条件 | 連結部高さ | 床面から495mm |
| 連結部位置(奥行方向) | 2本共に前方から550mm(前方バンパーは含めない) | |
| 連結部位置(幅方向) | それぞれ外側から60mm | |
| 最小旋回半径 | R600mm | |
| 牽引物キャスタ | 4輪フリータイプ | |
| 連結時経路制約 |
|
|
| 棚車設置位置(進行方向) | 所定位置より±50mm以内(ただし、棚車形状による) | |
| 棚車設置位置(幅方向) | 所定位置より±50mm以内(ただし、棚車形状による) | |
| 安全対策 | ピンの動きが妨げられ、過電流を検知した場合、停止する | |
カスタマイズオプション3
後進走行
後進走行
直進ルートの場合において、後進走行が可能となります

走行例
- 番地:70から前進走行を開始し、進行方向・右側の番地テープを読み取り、番地:71で停止する
- その後、バック走行を開始し、進行方向・右側の番地テープを読み取り、72番地で停止する

仕様/制約条件
| 後進条件 | 走行ルート | 直線ルートのみ(直線に対してAGVの姿勢に傾きがない状態で後進を開始すること) |
|---|---|---|
| 後進速度 | 22.5m/分以下(初期値15m/分) | |
| 後進走行精度(AGV単体) | 左右方向:80mm幅 | |
| 後進停止精度(AGV単体) | 前後方向:±15mm | |
| 後進用番地テープ | 後進方向右手側に設置(相対番地のみ対応) | |
| コースアウト | 自律探索動作を実施せず、即停止 | |
| ※積載、牽引時の後進走行精度は未評価となります(保証外) | ||
| 安全対策 |
|
|
-
※AGV-M2標準モデルは、「JIS D6802 無人搬送車システム安全通則」に準じた安全性を確保しております
-
※後進機能を有する場合、後進側にもバンパー装置の安全対策機能が必要となります
-
※当該装置の後進時の安全確保は、お客様の責任の下、お客様の判断で実施願います
-
※表示灯を設置してください、表示灯がないモデルの場合、お客様にてご対応をお願いします
カスタマイズオプション4
Li電池+非接触充電
Li電池+非接触充電
人手で行っていた”充電”の自動化で活人化および安全性の向上を実現します
- バッテリーを鉛電池からリチウム電池に変更し、非接触自動充電システムを搭載します。
- 従来の手作業によるバッテリー交換や、充電ステーションに移動しての充電方法とは異なり、
通常のライン稼働中のちょっとした停止時間を用いて、チョコ充電を繰り返し行います
-
※AGV単体走行時以外の停止精度、走行精度は保証外です
-
※AGV単体走行時以外のワイヤレス給電は非推奨です
-
※詳細仕様についてはお問い合わせください

カスタマイズオプション5
設備連携/エレベーター連携/防火扉連携
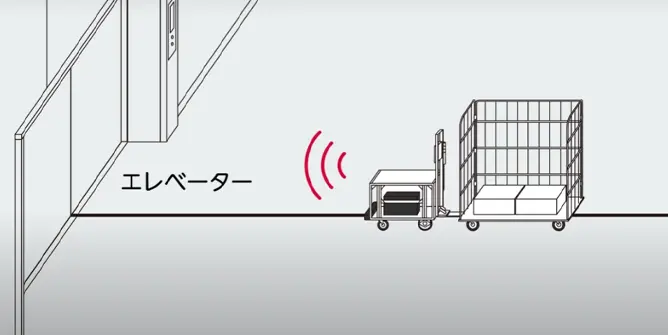
設備連携/エレベーター連携/防火扉連携
PLC活用によりAGVとの連携を図ります
- 設備連携: PLCからの指令を受け、AGVへの走行/停止指示を行います。
- エレベーター連携:AGVとエレベーター制御盤(改造要)が同期し、AGVがエレベーターへ自動乗降します。
- 防火扉連携:AGVが防火扉を通過中に防火扉が作動した時、防火扉に挟まれないような対応です。
-
※各連携において、制約/前提条件があるため、詳細仕様についてはお問い合わせください
カスタマイズオプション6
外部出力制御
外部出力制御
空き端子台に外部デバイスを接続し、指定時間AGV内のリレーをONにする機能になります
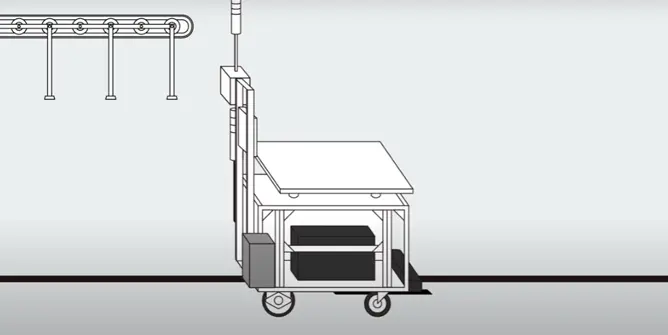
走行例
- 番地71で一時停止し、予備出力ポート1を指定時間の間ON(例:電動ピン上昇)、その後走行再開
- 番地72で一時停止し、予備出力ポート2を指定時間の間ON(例:電動ピン下降)、その後走行再開
- 番地73で停止

カスタマイズオプション7
行先指示システム
行先指示システム
遠隔でAGVの呼び出しや配送指示ができます
- スマホやタブレットで操作可能! 端末ごとに異なるボタン表示もできます。
- AGVの到着を待つことはありません! 搬送ジョブの予約ができます。
- ボタンを押してモノを置いておけば、あとはAGVが自動で搬送!
- モノの準備完了を待ち合わせて搬送することもできます。
-
※詳細仕様についてはお問い合わせください